High-definition maps (HD-maps) are used to model the road network at the highest possible definition. Each traffic lane is drawn as an area. This area is bounded by line geometries that show features like lane markings, curb-stones, road borders or virtual lanes within intersections. The map is used to reference vehicle or bicycle trajectories (“map matching”), or to forecast intentions like turn manoeuvres.
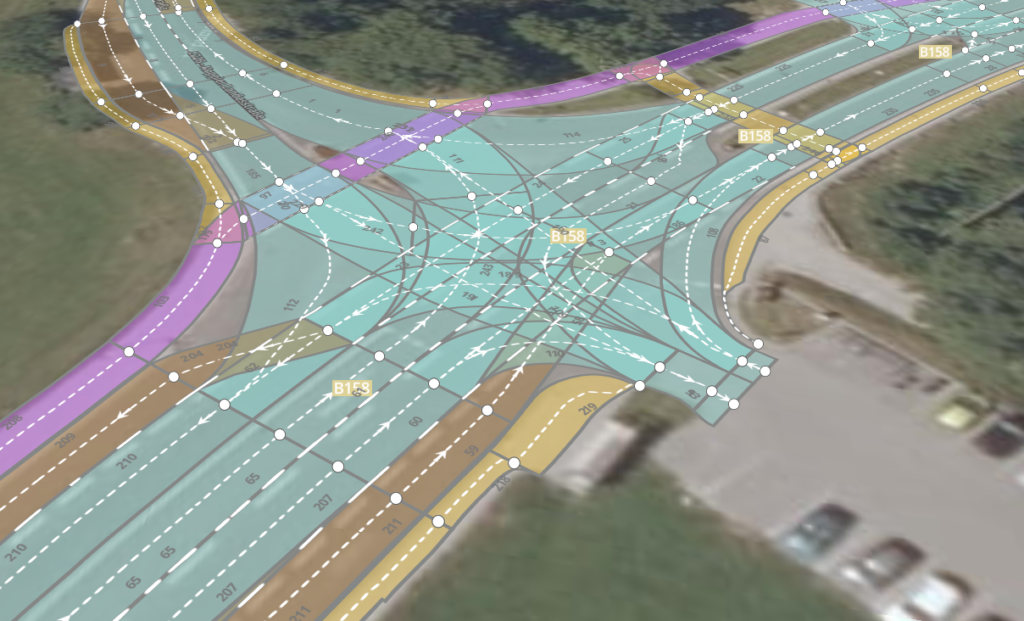
© HD graphs: Digibus® Austria and Joanneum Research; Orthophoto: basemap.at 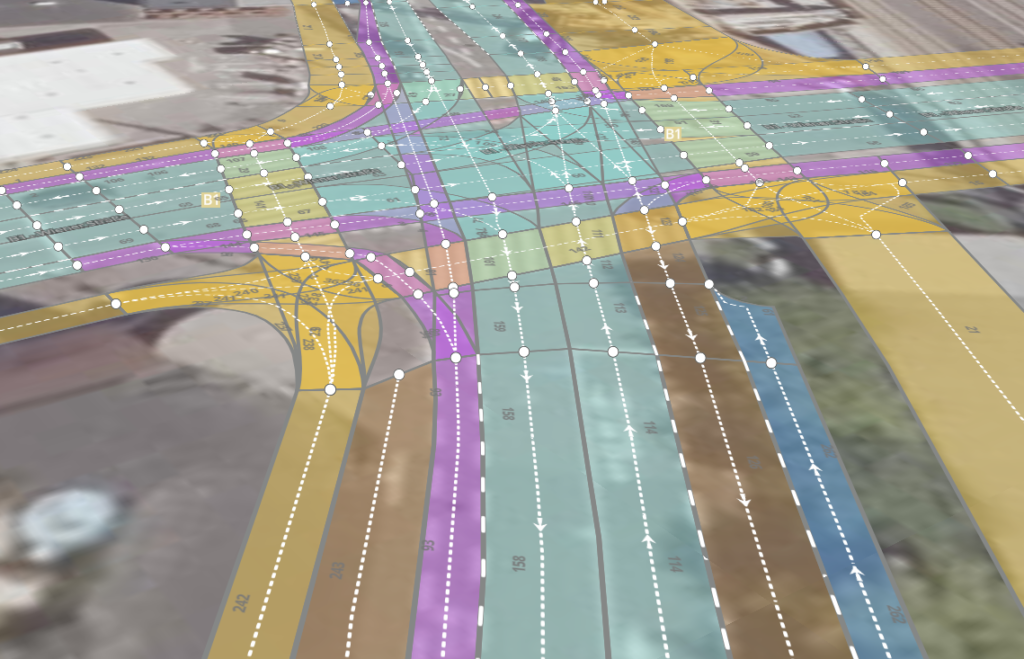
© HD graphs: Bike2CAV, Orthophoto: basemap.at